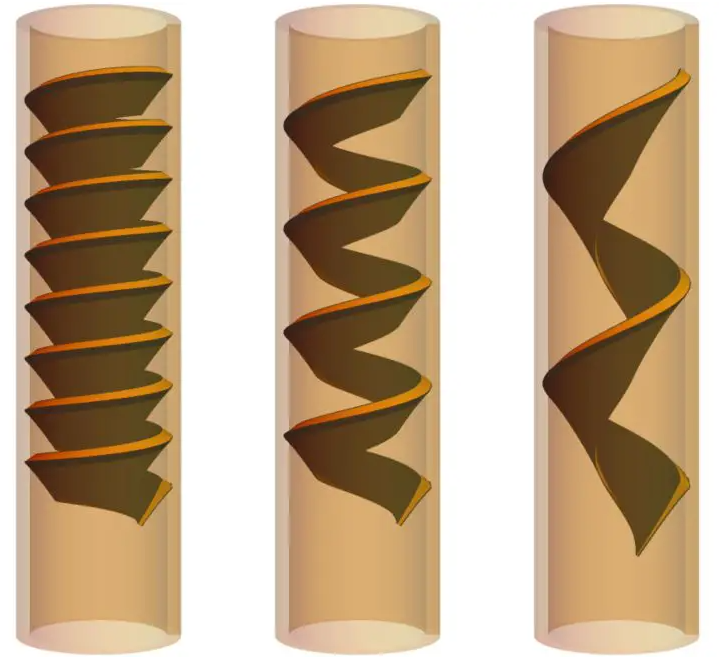
鲨鱼肠具有独特的螺旋形状,有利于流体沿一个方向流动。通过了解这种现象的工作原理,物理学家希望将这些原理应用于机器人和其他应用。
发明家尼古拉·特斯拉(Nikola Tesla)于1920年为一种管道申请了专利,他称之为“瓣膜导管”。它旨在在一个方向上抽取流体,而无需任何移动部件或增加能量,其应用范围从软机器人到医疗植入物。2021 年,科学家发现鲨鱼的螺旋形肠道的工作方式大致相同,有利于液体沿一个方向流动——从头部到骨盆。
华盛顿大学莎拉·凯勒(Sarah Keller)实验室的物理学家伊多·莱文(Ido Levin)对流体通过这些鲨鱼螺旋的物理流动产生了兴趣。20月67日星期一,在加利福尼亚州圣地亚哥举行的第3届年度生物物理学会会议上,他将介绍鲨鱼肠道的<>D打印模型如何帮助他们了解这些螺旋是如何工作的。
莱文解释说:“2021 年研究的研究人员将一根管子连接到鲨鱼肠道,并通过这些管道将含有甘油(一种非常粘稠的流体)的水放入这些管道中。他们表明,如果你将这些肠道与消化道连接在同一方向,你会得到比以相反方式连接它们更快的液体流动。从物理学的角度来看,我们认为这非常有趣......物理学中的一个定理实际上指出,如果你拿一根管道,并且流体非常缓慢地流过它,如果你反转它,你就会有同样的流动。因此,我们非常惊讶地看到与理论相矛盾的实验。但你要记住,肠道不是由钢制成的——它们是由柔软的东西制成的,所以当液体流过管道时,它会变形。
为了通过螺旋管研究流体动力学,Levin和Keller与华盛顿大学Nelson小组的同事合作,创建了模仿鲨鱼肠道各个方面的柔软3D结构。“15或20年前,不可能尝试用人造材料重建这些形状,”莱文说。当他们使用刚性材料3D打印形状时,流体在一个方向或另一个方向上的流动没有差异。然而,使用更柔软的弹性体打印形状会导致流体在一个方向上流动得更快。使用这些3D打印结构,该团队正在研究内部结构的半径,间距和厚度如何影响流体流动。对于较软的材料,他们还可以研究流速与管道变形方式之间的耦合。了解这些参数将有助于设计可用于软机器人等事物的类似结构。
直到最近,机器人都是用刚性材料和铰链制成的。但是,使用可以像章鱼一样以不同方式变形的软材料,打开了一个充满可能性的世界,莱文解释说,“这是试图理解膜和流动之间相互作用的基本机制的一步。有一天,这个看似简单的系统可以控制工业或医疗设备。