受狗敏捷课程的启发,Google DeepMind 的一组科学家开发了一种名为 Barkour 的机器人敏捷课程,以测试四足机器人的能力。
自20 世纪 70 年代以来,狗就被训练灵活地跳过铁环、斜坡和穿梭于两根杆子之间,以展示敏捷性。要想在这些比赛中夺冠,狗不仅要有速度,还要有敏锐的反应能力和对细节的关注。这些课程还为如何衡量不同品种的敏捷性设定了基准,这是丹佛的 Google DeepMind 科学家Atil Iscen所说的四足机器人世界所缺乏的东西。
尽管在过去十年中取得了很大的发展,包括麻省理工学院的 Mini Cheetah和波士顿动力公司的 Spot等机器人,它们展示了类动物机器人的运动方式,但由于缺乏针对这些类型机器人的标准化任务,因此很难比较它们的进步,伊森说。
“与之前为腿式机器人开发的基准不同,Barkour 包含多种障碍,需要结合不同类型的行为,例如精确行走、攀爬和跳跃,”Iscen 说。“此外,我们基于时间的指标来奖励更快的行为,鼓励研究人员突破速度的界限,同时保持对运动精度和多样性的要求。”
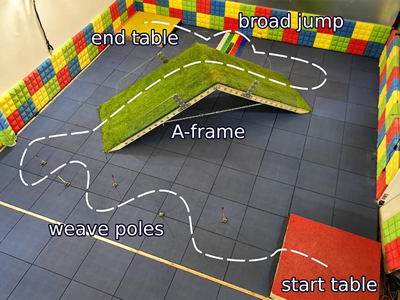
对于他们缩小的敏捷课程——Barkour 课程是 25 平方米而不是传统课程的743 平方米——Iscen 和他的同事从传统的狗敏捷课程中选择了四个障碍:暂停桌、编织杆、攀登 A -frame,然后跳跃。
Barkour 机器人四足基准课程使用传统狗敏捷课程中的四个障碍,并围绕受试者在课程中的时间安排对一组性能指标进行标准化。
“我们选择了这些障碍来设置多个敏捷轴,包括速度、加速度和平衡,”他说。“还可以通过将课程扩展到在更大区域内包含其他类型的障碍来进一步定制课程。”
与狗的敏捷性比赛一样,进入该课程的机器人会因未通过或错过障碍物以及超过课程大约 11 秒的时间限制而被扣分。为了了解他们的课程有多难,DeepMind 团队开发了两种不同的课程学习方法:一种针对课程所需的每种技能进行训练的专家方法——例如,跳跃或爬坡——以及一种通才方法,由研究使用专家方法运行的模拟。
在用这两种不同的方式训练四足机器人后,该团队将它们放到了球场上,发现用专业方法训练的机器人略微优于用通用方法训练的机器人。专家在大约 25 秒内完成了课程,而通才则用了接近 27 秒。然而,用这两种方法训练的机器人不仅超过了课程时间限制,而且还被两只小狗超越了——一只博美犬/吉娃娃混血犬和一只腊肠犬——它们在不到 10 秒的时间内完成了课程。
该团队在结论中写道:“正如该基准测试所证明的那样,机器人与其动物对应物之间的敏捷性仍然存在很大差距。”
虽然机器人的表现可能没有达到预期,但该团队写道,这实际上是积极的,因为这意味着仍有增长和改进的空间。未来,Iscen 希望 Barkour 课程的简单可重复性将使其成为一个有吸引力的基准,在整个领域被采用。
“我们积极考虑基准的可重复性,并将材料成本和占地面积保持在较低水平。我们很乐意看到 Barkour 设置在其他实验室中出现。”——Atil Iscen,谷歌 DeepMind
“我们积极考虑基准的可重复性,并将材料成本和占地面积保持在较低水平,”Iscen 说。“我们很乐意看到 Barkour 设置在其他实验室中出现,如果其他对这项工作感兴趣的研究团队可以联系我们,我们很乐意分享我们在构建它方面的经验教训。我们希望看到其他实验室采用这一基准,以便整个社区能够共同解决这一具有挑战性的问题。”
至于 DeepMind 团队,Iscen 表示他们也有兴趣在未来的工作中探索狗敏捷课程的另一个方面:人类伙伴的作用。
“从表面上看,(真正的)狗的敏捷性比赛似乎只关乎狗的表现。然而,很多事情都发生在狗和它的主人之间转瞬即逝的交流上,”他解释道。“在这种情况下,我们渴望探索人机交互,例如处理程序如何与有腿机器人一起工作以引导它迅速通过新的障碍课程。”