树木在许多生态系统中发挥着明显而关键的作用——无论是在阳光明媚的日子里提供阴凉,作为猫头鹰家族的家园,还是循环空气中的二氧化碳。但由于剥削性伐木行为以及荒漠化过程,森林正在减少,荒漠化使草原和灌木丛变得干旱。
通过种植新树来恢复这些地区的生物多样性是至关重要的第一步,但在这些干旱环境中种植树苗可能既费时又费力。为了解决这个问题,分别位于土耳其埃拉泽和阿德亚曼的费拉特大学和阿德亚曼大学的一组研究人员开发了一种机器人的概念设计,可以在 24 小时内钻孔和播种。时间。
安德里亚·博塔(Andrea Botta)是意大利都灵理工大学的工程学教授,研究农业机器人的使用。博塔没有参与这项研究,但他表示,种植这样的机器人可以填补劳动力较少的社区的一个重要空白。
“机器人非常擅长完成重复性任务,例如种植几棵树,并且还可以长时间工作,”博塔说。“在一个严重缺乏工人的社区中,完全自动化是一种公平的方法。”
植树机器人不一定是一个新概念,可以采取各种形状和尺寸。土耳其研究团队在工作中探索了现有的不同植树机器人,包括四足机器人、履带机器人和轮式机器人。这些机器人由加拿大维多利亚大学的学生或中国科技巨头华为的工程师等团体设计,要么使用蒸汽、电池,要么使用柴油。其中几个机器人甚至被设计成一次可以背着 300 多棵树苗,从而减少了在温室和种植地之间往返的时间。
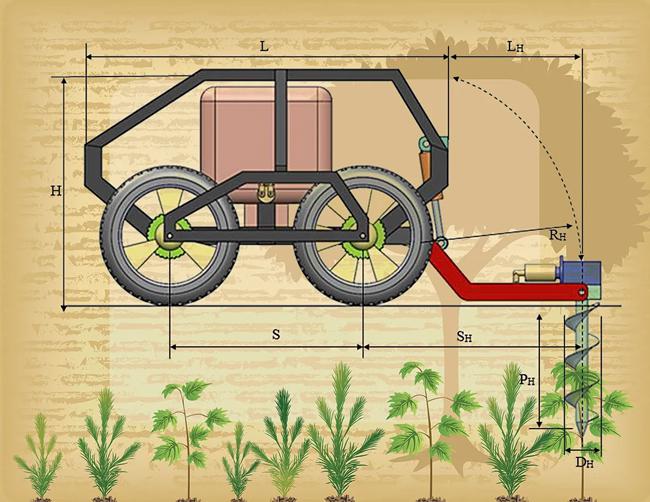
考虑到这些设计,土耳其的研究团队开发了一个机器人播种机的 3D 模型,该模型有四个轮子、一个钢架和一个背部安装的液压钻机。这款重 136 公斤的机器人使用柴油动力,设计一次可行驶 300 厘米,然后为每颗幼苗钻 50 厘米的孔。在未来的迭代中,该团队计划纳入自主传感。
“作为未来的研究,我们计划制造我们设计的机器人并开发自主运动算法,”该团队在论文中写道(研究人员拒绝对本文发表评论)。“近年来传感器技术的快速发展以及多传感器数据融合研究的加速,为机器人获得环境感知和自主运动能力铺平了道路。”
特别是,该团队计划将环境传感单元(包括摄像头和超声波传感器)安装到机器人背部的万向节上。然后,这些传感器数据将输入该团队计划开发的运动和物体检测算法中。
然而,博塔说,为这些类型的机器人增加更多自主权并不一定意味着它们应该在植树方面享有自由。特别是在他们可能与人类工人一起工作的情况下。
“人机协作是一个非常流行的话题,应该根据情况仔细设计,”他说。“在工作中引入自动化也可能会带来问题,因此应该考虑当地社区和场景来适当应用。例如,如果有大量劳动力,机器人的设计应考虑与工人的强大协同作用,以减轻他们的负担,同时避免伤害社区。”
在未来的设计迭代中,Botta也希望能够考虑到种植环境和种植类型的多样性。例如,为机器人添加悬架以实现更好的全地形驾驶,或添加太阳能电池板以补充电力,并允许机器人在其他燃料来源可能不易获得的情况下运行。为机器人添加可再生能源选项也有助于确保它们在种植时保持碳中和。
博塔说,考虑机器人如何处理多种类型的植物也很重要。
“似乎大多数(如果不是全部)机器人解决方案都创建了林场,但我们可能需要的是种植具有显着生物多样性的实际森林,”他说。