康奈尔大学的研究人员建造了一个微型四足机器人,可以使用燃烧执行器跳跃,如摆姿势的图片所示
化学燃料的能量密度很难被超越。电池安静、清洁,易于与电动机器人集成,但其能量密度比甲醇或丁烷等化学燃料低 20 到 50 倍。对于大多数能够携带一大堆电池的机器人来说,这很好,但当你开始观察昆虫大小或更小的机器人时,电池根本无法很好地缩小尺寸。不仅仅是电池,电动执行器也不能很好地缩小尺寸,特别是如果你正在寻找可以产生大量电力的东西。
在 9 月 14 日发表在《科学》杂志上的一篇论文中,康奈尔大学的研究人员利用本质上非常微小、非常软的内燃机解决了小规模驱动问题。甲烷蒸气和氧气被注入软燃烧室,其中微小的火花点燃混合物。半毫秒内,腔室顶部像活塞一样向上膨胀,通过每秒重复 100 次的循环产生 9.5 牛顿的力。将两个执行器放在一起(驱动两条腿),你就得到了一个异常强大的软四足机器人。
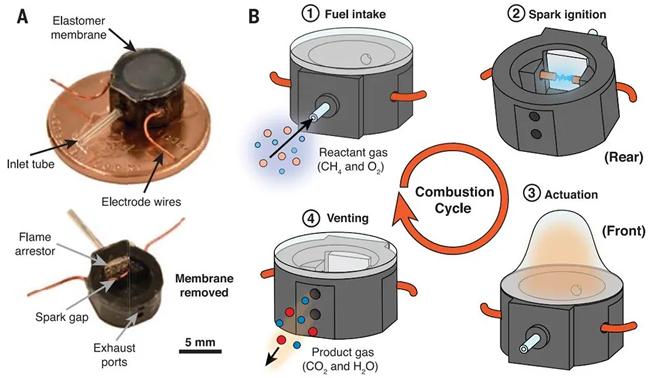
为该机器人提供动力的两个执行器的重量仅为 325 毫克,大约是一美分硬币大小的四分之一。它们之所以如此之小,部分原因是大多数相关部件都在机外,包括燃料本身、混合和输送燃料的系统以及火花发生器的电源。但即使没有所有这些东西,执行器也有很多功能可以使其能够在高循环频率下连续运行而不会熔化。
执行器及其组件材料的视图以及燃烧执行循环图。科学机器人
最大的问题可能是这个执行器必须能够处理实际的爆炸,这意味着需要仔细设计以确保它不会在每次爆炸时自行燃烧。小燃烧体积对此有所帮助,阻燃弹性体材料和集成阻火器也有帮助。尽管该执行器的工作方式固有的暴力性,但它实际上非常耐用,研究人员估计它可以连续运行超过 750,000 个周期(50 赫兹下 8.5 小时)而不会出现任何性能下降。
“有趣的是小规模燃烧的威力有多大,”康奈尔大学有机机器人实验室的负责人罗伯特·F·谢泼德 (Robert F. Shepherd) 说。近十年前,我们在 IROS 2014 上报道了 Shepherd 在燃烧动力机器人方面的一些工作,其中包括这个奇怪的粉红色跳跃物体。但谢泼德告诉我们,规模较小既有挑战也有好处。“我们在可燃气体体积的下限范围内运行。这对于科学来说是一个有趣的地方,而且工程成果也很有用。”
第一个工程成果是一个昆虫级的小型四足机器人,它利用两个软燃烧执行器为每条腿提供动力。该机器人长 29 毫米,重量仅为 1.6 克,但它可以垂直跳跃 59 厘米,并且可以携带 22 倍于自身重量的重量行走。谢泼德说,对于昆虫规模的机器人来说,这是“接近昆虫水平的性能,跳得非常高、速度非常快,并且能够承载很大的负载。”
由于执行器移动得如此之快,所以很难看出四足动物实际上是如何行走的。每个执行器控制机器人的一侧,其中一个燃烧室通过弹性体膜连接到每只脚上的燃烧室。该驱动系统的一个优点是,由于动力源是气压,因此您可以在燃烧室本身之外的其他地方施加该压力。同时触发两个执行器会使机器人向前移动,同时触发一侧或另一侧可以旋转机器人,提供一些方向控制。
谢泼德告诉我们:“我们需要付出大量的努力、迭代和智慧才能研制出这种可操纵的昆虫级机器人。” “它一定要有腿吗?不,它可能是一只快速的蛞蝓,也可能是一只拍动翅膀的蜜蜂。该系统可能的幅度和频率允许所有这些可能性。事实上,我们面临的真正问题是事情进展缓慢。”
让这些执行器放慢一点速度是研究人员接下来要研究的事情之一。通过用速度换取力量,我们的想法是制造能够行走、奔跑和跳跃的机器人。当然,找到一种方法来解除这些系统的束缚是自然而然的下一步。他们正在考虑的其他一些东西非常疯狂,正如谢泼德告诉我们的那样:“我们未来想要探索的一个想法是使用这些小型而强大的执行器的集合作为大型机器人中的大型可变招募肌肉组织。将数千个这样的执行器捆绑在刚性内骨骼上可以实现灵巧且快速的陆基混合机器人。” 就我个人而言,我什至很难想象像那样的机器人,但这就是它令人兴奋的地方,对吧?一个巨大的机器人,其肌肉由数千次微小爆炸提供动力——哇。