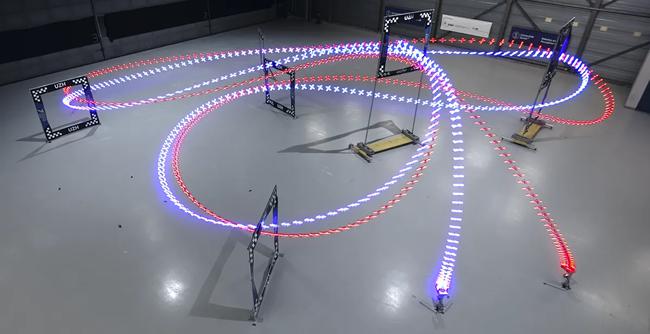
比赛场地由专业无人机飞行员设计,共有七个门,体积为30 x 30 x 8米。大门的布置要求无人机执行复杂的杂技动作,其中自动无人机系统 Swift(蓝色)的路线比人类驾驶的无人机(红色)要紧得多,如延时拍摄所示图像。
无人机发出尖叫声。它飞得如此之快,用我的相机追踪它是不可能的,所以我放弃了,难以置信地看着它。当无人机以超人的速度扭转、转弯和后空翻穿过球场的方形塑料门时,赛车四旋翼多普勒的四个电机发出尖锐的呜呜声。我和苏黎世大学机器人与感知小组的无人机创造者一起躲在苏黎世郊外机场机库的安全网后面。
“我什至不知道我刚刚看到了什么,” 亚历克斯·范诺弗(Alex Vanover)说道,此时无人机在 5.3 秒内完成 75 米航程后悬停。“那太美了,”托马斯·比特马塔补充道。“有一天,我的梦想是能够实现这一目标。” Vanover 和 Bitmatta 可以说是世界上最好的无人机竞赛飞行员,是竞争激烈的国际无人机竞赛赛道的多年冠军。他们来这里是为了证明人类飞行员没有被机器人打败。然而。
将这些高性能四旋翼飞行器与爱好者用于摄影的无人机进行比较就像将喷气式战斗机与轻型飞机进行比较:赛车四旋翼飞行器在速度和敏捷性方面进行了大量优化。典型的赛车四旋翼飞行器可输出 35 牛顿米(26 磅英尺)的力,四个电机以 30,000 转/分钟的速度旋转三叶螺旋桨。该无人机重量仅为 870 克,包括1,800 毫安时的电池,续航时间仅为 2 分钟。这种极端的功率重量比使无人机能够以 4.5 g /s 的速度加速,不到一秒即可达到每小时 100 公里。
自动赛车四旋翼飞行器具有类似的规格,但我们刚刚看到飞行的那架没有摄像头,因为它不需要摄像头。相反,机库配备了 36 个摄像头的红外跟踪系统,可以每秒 400 次将无人机定位在毫米范围内。通过将位置数据与航线地图相结合,机外计算机可以引导无人机沿着最佳轨迹行驶,即使不是不可能,即使是最好的人类飞行员也很难做到这一点。
从某种意义上说,这些自主无人机是在作弊。人类飞行员只能通过安装在无人机上的摄像头获得单一视图,以及他们对航线和飞行经验的了解。因此,价值 40 万美元的传感器和计算机能够超越人类飞行员也就不足为奇了。但这些专业无人机飞行员之所以来到苏黎世,是为了看看他们在真正公平的竞争中表现如何。
一张方形大门的照片,两架无人机穿过它。 一架有人驾驶的竞赛无人机(红色)以每秒超过 13 米的速度追赶一架基于视觉的自主无人机(蓝色)穿过大门
解决无人机竞赛问题
“我们正在努力创造历史,” 苏黎世大学 (UZH)机器人和感知小组负责人Davide Scaramuzza说道。“我们希望证明,人工智能驱动的、基于视觉的无人机可以在无人机比赛中达到人类水平,甚至超人类水平的表现。” 使用视觉是这里的关键:Scaramuzza 一直致力于开发能够像大多数人一样感知的无人机,依靠摄像头感知周围的世界,并主要根据视觉数据做出决策。这将使比赛变得公平——人类的眼睛和人类的大脑与机器的眼睛和机器的大脑相对,每个参赛者都在同一个赛道上尽可能快地驾驶相同的四旋翼飞行器。
“无人机竞赛(与人类)是评估基于自主视觉的机器人技术进展的理想框架,”Scaramuzza 解释道。“当你解决无人机竞赛问题时,应用程序会走得更远,因为这个问题可以推广到其他机器人应用程序,例如检查、交付或搜索和救援。”
虽然已经有无人机执行这些任务,但它们往往飞行缓慢且小心。斯卡拉穆扎表示,飞得更快可以使无人机更加高效,从而提高其飞行时间和航程,从而提高其实用性。“如果你想让无人机取代人类执行枯燥、困难或危险的任务,无人机就必须比人类更快或更有效地完成任务。这就是我们正在努力的方向——这就是我们的抱负,”斯卡拉穆扎解释道。“机器人技术面临许多艰巨的挑战。快速、敏捷、自主的飞行就是其中之一。”
自主导航
Scaramuzza 的自主无人机系统名为 Swift,从球场的三维地图开始。人类飞行员也可以访问该地图,以便他们可以进行模拟练习。人类和机器人无人机飞行员的目标都是尽快飞过每个登机门,而实现这一目标的最佳方法是通过所谓的时间最优轨迹。
机器人在这里具有优势,因为它可以(在模拟中)以可证明最佳的方式计算给定路线的轨迹。但了解最佳轨迹只能让你走这么远。Scaramuzza 解释说,模拟永远不会完全准确,尤其难以建模的事物(包括飞过大门的无人机的湍流空气动力学以及无人机本身的灵活性)使得很难坚持最佳轨迹。
虽然每架载人无人机(红色)都配备了 FPV 摄像头,但每架自主无人机(蓝色)都配备了由 Nvidia Jetson TX2 机载计算机提供支持的英特尔实感视觉系统。两组无人机还配备了由外部摄像头系统跟踪的反射标记。
Scaramuzza 表示,解决方案是使用深度强化学习。您仍在模拟中训练您的系统,但您还要求强化学习算法进行持续调整,将系统调整到现实环境中的特定轨道。一些真实世界的数据在赛道上收集并添加到模拟中,使算法能够合并现实的“噪音”数据,以便更好地为实际航线的飞行做好准备。无人机永远不会以这种方式飞行在数学上最优化的轨迹,但它会比使用在完全模拟环境中设计的轨迹飞行得快得多。
从那时起,唯一剩下的事情就是确定将 Swift 推向多远。首席研究员之一埃利亚 ·考夫曼 (Elia Kaufmann ) 引用马里奥·安德雷蒂 (Mario Andretti) 的话:“如果一切看起来都在掌控之中,那么你只是进展得不够快。” 找到控制边缘是基于自主视觉的四旋翼飞行器能够比人类控制的飞行器飞得更快的唯一方法。“如果我们成功运行,我们就会再次加快速度,”考夫曼说。“我们会一直这样做,直到坠毁。很多时候,我们在一天结束时回家的条件要么是一切正常(但从未发生过),要么是所有无人机都坏了。”
机器人如何飞行
一旦 Swift 确定了所需的轨迹,它就需要沿着该轨迹导航无人机。无论您驾驶无人机还是驾驶汽车,导航都涉及两个基本内容:了解您所在的位置以及了解如何到达您想去的地方。自主无人机已经提前计算出最佳路线,但要沿着该路线飞行,它们需要一种可靠的方法来确定自己的位置以及速度和方向。
为此,四旋翼飞行器使用英特尔实感视觉系统来识别赛车门的角落和其他视觉特征,以在赛道上定位自己。Nvidia Jetson TX2 模块包括 GPU、CPU 和相关硬件,负责管理板上的所有图像处理和控制。
仅使用视觉对无人机的飞行方式施加了重大限制。例如,虽然四旋翼飞行器同样能够向任何方向飞行,但 Swift 的相机大多数时候需要指向前方。还有运动模糊的问题,当无人机相机馈送中的单个帧的曝光长度足够长以至于无人机在这段时间内的自身运动变得显着时,就会发生运动模糊问题。当无人机转弯时,运动模糊尤其成问题:高角速度会导致模糊,导致无人机失明。机器人专家必须规划其飞行路径,以最大限度地减少运动模糊,在时间最佳飞行路径和无人机可以飞行而不会坠毁的路径之间找到折衷方案。
Davide Scaramuzza(最左)、Elia Kaufmann(最右)和苏黎世大学的其他机器人专家观看了一场势均力敌的比赛
人类如何飞行
对于人类飞行员来说,挑战是相似的。四旋翼飞行器的性能比飞行员通常使用的性能要好得多。Bitmatta 估计他的无人机飞行性能约为其最大性能的 60%。但对人类飞行员来说最大的限制因素是视频输入。
人们使用视频护目镜以所谓的第一人称视角 (FPV) 进行无人机比赛,该护目镜显示来自安装在无人机前部的摄像头的实时反馈。苏黎世飞行员使用的 FPV 视频系统可以以每秒 60 隔行帧的速度传输,而模拟 VGA 质量相对较差。在模拟中,无人机飞行员以每秒超过 200 帧的高清速度进行练习,这产生了巨大的差异。“我们做出的一些决策仅基于四个数据帧,”Bitmatta 解释道。“更高质量的视频、更好的帧速率和更低的延迟,将为我们提供更多的数据可供使用。” 尽管如此,最让机器人专家印象深刻的事情之一是人们在可用的视频质量下的表现如何。
斯卡拉穆扎说,人类飞行员似乎也在尝试计算时间最佳轨迹。“一些飞行员告诉我们,经过几个小时的排练,他们试图想象一条穿过航线的假想线。因此我们推测他们实际上是在构建环境的心理地图,并学习计算要遵循的最佳轨迹。这很有趣——人类和机器似乎都以同样的方式进行推理。”
但为了飞得更快,比特马塔试图避免遵循预定的轨迹。“通过预测飞行,我试图按照我脑海中的计划飞行。通过反应式飞行,我会观察眼前的事物并不断对周围环境做出反应。” 在受控环境中,预测飞行可以很快,但如果发生任何不可预测的情况,或者 Bitmatta 哪怕只是短暂地注意力不集中,无人机在他做出反应之前就会飞行数十米。“从一开始就采取反应性飞行可以帮助你从意外情况中恢复过来,”他说。
人类会有优势吗?
“与我们目前拥有的自主系统相比,人类飞行员具有更强的概括能力、即时决策能力以及从经验中学习的能力。”克里斯蒂安·普法伊弗 (Christian Pfeiffer) 解释 道。他们做什么。“人类已经适应了对未来的计划,而机器人则没有长期的愿景。我认为这是目前人类和自主系统之间的主要区别之一。”
斯卡拉穆扎对此表示同意。“人类通过多年与世界的互动积累了更多的经验,”他说。“他们的知识面要广泛得多,因为他们接受过许多不同情况的培训。目前,我们在机器人社区面临的问题是我们总是需要为每个特定任务训练算法。人类仍然比任何机器都更好,因为人类可以在非常复杂的情况下和存在不完美数据的情况下做出更好的决策。”
“我认为我们人类可以从这些机器人的飞行方式中学到很多东西。” ——托马斯·比马塔
这种认为人类仍然是更好的通才的认识给人类带来了一些重大限制。“公平性”严重偏向于机器人,因为比赛虽然设计得尽可能平等,但却是在斯威夫特可能有机会的唯一环境中进行的。机器人专家已尽最大努力将不可预测性降到最低——例如,机库内没有风,并且照明受到严格控制。“我们正在使用最先进的感知算法,”Scaramuzza 解释道,“但即使是最好的算法,由于光照变化,仍然会出现很多故障模式。”
考夫曼说,为了确保一致的照明,斯威夫特训练的几乎所有数据都是在夜间收集的。“夜晚的好处在于你可以控制照明;你可以打开灯,每次都有相同的条件。如果您在早上飞行,当阳光进入机库时,所有的背光都会使相机很难看到登机门。我们可以应对这些情况,但我们必须以较慢的速度飞行。当我们将系统推向绝对极限时,我们就会牺牲鲁棒性。”
比赛日
比赛于周六早上开始。阳光透过机库的天窗和敞开的门照射进来,当人类飞行员和自动无人机开始绕跑道试飞时,很明显基于视觉的无人机的表现不如前一天晚上。它们经常会剪断大门的侧面并失控旋转,这是基于视觉的状态估计正在被抛弃的明显迹象。机器人专家们似乎很沮丧。人类飞行员似乎持谨慎乐观的态度。
比赛的获胜者将连续飞出最快的三圈且没有坠毁。人类和机器人以基本相同的方式追求这一目标,通过调整飞行参数来找到他们几乎无法控制的点。当赛车手挑战极限时,四旋翼飞行器会撞向大门、墙壁、地板和天花板。这是无人机比赛的正常组成部分,有数十架替换无人机和工作人员在无人机损坏时进行修复。
专业无人机飞行员 Thomas Bitmatta(左)检查外部跟踪系统记录的飞行路径。人类飞行员认为通过研究机器人他们可以飞得更好
将有几个不同的指标来决定人类或机器人是否更快。昨晚用于主动控制自主无人机的外部定位系统今天被用于被动跟踪,记录赛道每个部分、赛道每一圈以及每场三圈多无人机比赛的时间。
当人类飞行员适应航线后,他们的单圈时间就会减少。每圈十秒。然后8秒。然后是6.5秒。飞行员们隐藏在 FPV 耳机后面,全神贯注地看着他们尖叫的四旋翼飞机呼啸而过。与此同时,斯威夫特则表现得更加稳定,通常单圈时间低于 6 秒,但经常无法连续完成三圈而不发生碰撞。看到斯威夫特的单圈时间,人类飞行员自我鞭策,他们的单圈时间进一步缩短。一切都会非常接近。
面对面的比赛开始了,斯威夫特和一名人类飞行员在起跑号角响起时并肩起航。人类立即处于劣势,因为与机器人相比,人的反应时间很慢:Swift 可以在不到 100 毫秒的时间内发射,而人类需要大约 220 毫秒才能听到噪音并做出反应。
苏黎世大学的埃利亚·考夫曼 (Elia Kaufmann) 正在为比赛准备一架基于自主视觉的无人机。由于起落架只会减慢竞赛无人机的速度,因此它们会从支架上起飞,这样它们就可以直接向第一道门发射
在赛道上,人类飞行员 几乎可以跟上斯威夫特:机器人的最佳三圈时间是 17.465 秒,而 Bitmatta 是 18.746 秒,Vanover 是 17.956 秒。但在与斯威夫特的九场正面交锋中,范诺弗赢得了四场,而在七场比赛中,比特马塔赢得了三场。这是因为斯威夫特大多数时候都没有完成任务,要么与门相撞,要么与对手相撞。人类飞行员可以从碰撞中恢复,必要时甚至可以从地面重新起飞。斯威夫特不具备这些技能。机器人速度更快,但鲁棒性也较差。
变得更快
“机器人的绝对性能——当它工作时,它非常出色,”比赛日结束时我与 Bitmatta 交谈时说道。“这比我们想象的要领先一些。人类仍然可以实现与它匹敌的目标,但目前对我们来说有利的是,它看起来适应性不太强。”
苏黎世大学的考夫曼并不反对。“比赛前,我们认为稳定性将是我们的优势。事实证明并非如此。” 考夫曼补充说,让无人机变得更加强大,使其能够适应不同的照明条件,主要是收集更多数据的问题。“我们可以通过重新训练感知系统来解决这个问题,我相信我们可以大幅改进。”考夫曼认为,在受控条件下,基于自主视觉的无人机的潜在性能已经远远超出了人类飞行员的能力。即使这一点没有通过比赛得到最终证明,将人类飞行员带到苏黎世并收集有关他们如何飞行的数据使考夫曼对斯威夫特的能力更加充满信心。“我们高估了人类飞行员,”他说。“我们在训练时测量了他们的表现,并且放慢了速度以提高成功率,因为??我们发现我们可以飞得更慢,但仍然会获胜。我们最快的策略将四旋翼飞行器加速至 4.5 g s,但我们看到,如果我们的加速速度只有 3.8 g s,我们仍然可以安全获胜。”
Bitmatta 认为人类也有更大的潜力。“我们去年所做的飞行与我们现在所做的相比根本不算什么。我们的进步速度真的很快。我认为我们人类可以从这些机器人的飞行方式中学到很多东西。”
有用的飞行机器人
据斯卡拉穆扎所知,去年夏天在苏黎世举行的这项赛事是全自动移动机器人首次在现实竞技运动中取得世界冠军的成绩。但是,他指出,“这仍然是一项研究实验。它不是一个产品。我们距离制造出能够在任何环境和任何条件下工作的产品还很遥远。”
除了使无人机更能适应不同的照明条件外,机器人专家还教斯威夫特像人类一样从已知航线推广到新航线,并安全地绕着其他无人机飞行。所有这些技能都是可转移的,并最终将导致实际应用。“无人机竞赛正在将自主系统推向其绝对极限,”机器人专家克里斯蒂安·菲弗(Christian Pfeiffer)说。“这不是最终目标,而是构建更好、能力更强的自主机器人的踏脚石。” 当其中一个机器人飞过你的窗户,把包裹扔到你的咖啡桌上,然后又飞出去时,这些研究人员将赢得你的感谢。
斯卡拉穆扎坚信,他的无人机有一天将成为空中冠军——不仅在苏黎世精心控制的机库内,而且在任何它们可以对人类有用的地方。“我认为最终,机器将比任何人类飞行员都更好,特别是当一致性和精度很重要时,”他说。“我认为这没有争议。问题是,什么时候?我认为未来几十年内不会发生这种情况。目前,人类在处理不良数据方面要好得多。但这只是一个感知问题,计算机视觉正在向前迈出巨大的一步。最终,机器人不仅会赶上人类,还会超越人类。”
与此同时,人类飞行员却泰然处之。“看到人们将赛车作为一种学习方式,我很感激,”比特马塔说。“我的一部分是一名赛车手,不希望任何事情比我更快。我内心深处对这项技术的发展前景感到非常兴奋。可能性是无限的,这是可能改变整个世界的事情的开始。”